
|
Applications in Earth Orbit Module External Robotics  Animation of the EUROBOT: The robot walks on the handrails of an ISS module. Credits ESA/Alcatel Alenia Space Italy Module Internal Robotics  The COLUMBUS Internal Automation and Robotics Testbed at the ESTEC Robotics Laboratories Geostationary Servicing 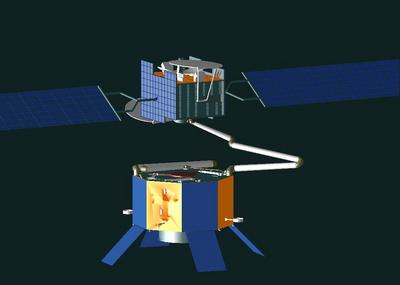 Animation of ESA's Geostationary Servicing Vehicle. In the movie the GSV approaches atarget satellite (Olympus) following a series of Hohman manouvres. Then the GSV robot prepares the spacecraft by erecting the docking/rigidisation structure. Next the GSV approaches from behind Olympus and captures it by its main engine nozzle. This is done by the robot handling a dedicated capture tool. Since in this case Olympus spins, the GSV spins up to the same speed along the same axis. The stinger of the capture tool is inserted via the nozzle in the combustion chamber and expanded to prevent the target from escaping. During insertion, the robot continuously adjusts its motion based upon distance and contact force measurements. After latching, the tumbling motions is gradually eliminated by the robot arm and the capture tool, followed by berthing and docking of the two spacecraft. The robot arm then berths the spacecraft to the GSV by latching the (other end of the) capture tool into its fixed position. The robot arm is now released and picks up a tool from its toolbox. Next the robot reaches for the stuck solar array, releases it and deploys it into its operational position. Last update: 28 November 2006 |